UAM 시스템 발전에서의 IT의 역할
UAM 분야에서 IT는 다양한 형태로 광범위하게 적용되고 있음에도 불구하고, 기술적으로는 아직 미성숙한 단계이며 IT의 잠재력을 충분히 활용하지 못하고 있다.
또한, IT와 UAM 간의 연계성과 발전 과정을 종합적으로 분석한 리뷰 연구가 부족한 실정이다.
본 연구의 목적은 이러한 공백을 메우고 독자들에게 UAM 분야에서 IT의 발전과 성과에 대한 종합적인 이해를 제공하는 것이다.
본 개요는 IT가 UAM 개발에 기여한 기존 문헌을 종합적으로 분석함으로써, 이 급부상하는 분야에 미친 IT의 영향을 명확히 하고자 한다.
연구 방법
- UAM 관련 IT 기술의 발전 요약 및 기존 기술의 응용 프로그램들의 종합적인 모음 제시
- 차량 설계, 비행 경로 계획, 안전 및 보안을 포함한 UAM의 다양한 측면에서의 IT의 역할에 대한 체계적인 개요 제공
- IT를 UAM에 적용하는 데 있어 주요 도전 과제를 식별하고, 이 분야를 발전시키기 위한 미래 연구 방향 제안
|
|
|
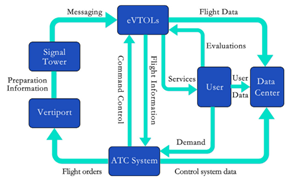
그림 1. UAM system composition and interaction between components. |
|
|
eVTOL(Electric vertical takeoff and landing) aircraft
수직 이착륙하는 전기 항공기(eVTOL)는 UAM에서 가장 중요한 요소들 중 하나이다. eVTOL의 가장 큰 장점은 활주로와 같이 넓은 이착륙 시설을 필요로 하지 않는다는 점이다. 또한 신속하게 지점과 지점 간 이동 서비스를 제공하는 것이 가능하고 도로 교통 혼잡을 낮추며, 소음과 공해가 적다.[1]
Palaia 등은 eVTOL을 위한 맞춤 디자인 방법을 제시했다.[2] 이 방법은 공기 역학, 임무 분석, 구조 설계 및 추진력 크기 산정을 수행하며, 주요 설계 변수들과 주요 항공기 요구사항에 대한 민감도 분석 또한 진행한다.
한편 회전익 항공기의 광대역 소음 평가를 위한 물리 기반 예측 모델을 개발하였다. 그리고 인공신경망(artificial neural networks)과 선형 회귀 분석을 활용해 회전익 항공기 꼬리 엣지의 광대역 소음을 위한 머신 러닝 베이스 예측 모델을 개발하였다. 인공신경망 모델은 소음 수준의 변화를 정밀하게 포착할 수 있다.
버티포트
버티포트는 eVTOL과 착륙 및 도킹 지점을 제공하는 시설이다. 효율적이고 지속 가능한 UAM 시스템을 위해서 신중하게 설치 장소를 계획하고, 운영에 충분한 수의 버티포트를 설치하는 것이 중요하다. GIS 기반의 소프트웨어가 버티포트의 배치 순서를 효과적으로 검증하는 데 도움을 줄 것이다. 통근 인구를 기반으로 K-평균 클러스터링(K-means clustering) 기법을 적용하여 인구 밀집 군집을 식별하였으며, 각 군집의 중심점을 버티포트 위치로 선정하였다. 또한, 소음 영향을 최소화하기 위해 소음 우선(noise-first) 경로를 설계하여, 소음에 노출되는 인구 수를 줄였다.
항공교통관제(ATC) 시스템
UAM의 안전하고 효율적인 운항을 위해서는 기존 항공교통관제(ATC) 시스템과의 유기적인 통합이 필수적이다. ATC 시스템은 eVTOL 운항의 스케줄 조정, 충돌 방지, 비행 경로 및 고도 제어 등의 핵심 기능을 수행한다. 도심 내 복잡하고 동적인 공역 환경에서 ATC의 역할은 교통 흐름의 최적화와 운항 안전성 확보에 기여한다. UAM 시스템의 지속 가능한 발전을 위해서는 ATC 시스템의 기술적 고도화 및 운영 효율성 향상이 요구된다. 최근에는 강화학습 및 그래프 신경망 기반의 지능형 ATC 시스템이 제안되어 Vertiport 기반 UAM 교통 관리의 가능성을 입증하고 있다.
유저 터미널
유저 터미널은 eVTOL 서비스 공급자와 이용자 사이를 잇는 필수적인 연결수단이다. 유저는 모바일 앱, 스마트폰, 태블릿과 같은 기기들로 UAM 시스템에 접속해 필요로 하는 eVTOL 서비스를 받는다. 공급자와 유저 사이의 소통을 원활하게 하여 UAM의 접근성과 이용성을 높인다.
eVTOL 시스템의 변화하는 요구사항과 기능을 충족하기 위해 사용자 친화적이면서 보안이 확보되는 맞춤형 사용자 단말기가 필요하다. Dao를 비롯한 연구자들은 UTM(무인 항공교통관리)을 위한 소형 eVTOL 시스템을 보조하는 그래픽 유저 인터페이스 플랫폼을 개발하였다.[3]
해당 플랫폼은 에어 택시 서비스를 포함한 다양한 UAM 개념을 시험 및 평가하는 데 활용될 수 있으며, 대도시 지역에서의 안전하고 효율적인 UAM 운항을 지원하기 위한 신기술 및 운용 절차 개발에도 기여할 수 있다. |
|
|
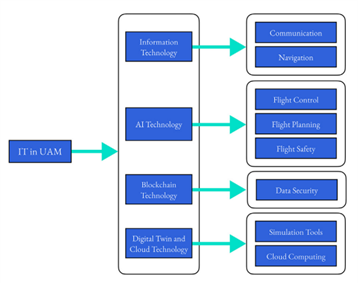
그림 2. KEY IT Tech to UAM development. |
|
|
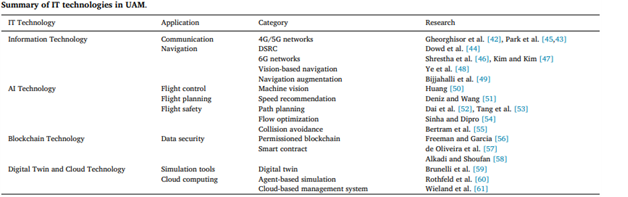
표 1. Summary of IT tech in UAM |
|
|
정보 기술
정보 기술은 eVTOL, 지상 관제소, 승객과 같은 다양한 시스템 구성 요소들 간의 정보 교환을 가능하게 한다. UAM 시스템에서는 4G/5G 네트워크, 위성 통신, 전용 근거리 통신을 활용한다.
Park 등은 UAM 통신을 지원하기 위한 셀룰러 네트워크의 여러 향상 방안을 제안하였으며, 링크 성능(link performance) 평가를 위해 결합 손실(coupling loss)과 기하학적 SINR(Geometric Signal-to-Interference-plus-Noise Ratio)을 두 가지 성능 지표로 사용하였다.[4] 이들의 해법은 UAM 통신을 보조하는 공중 장치를 만들어 배포하는 것이다. 이 장치는 장소에 따라 유연하게 배치가 가능하며 재사용할 수 있다.
공중 통신 및 위성통신을 활용하여 6G 기술을 사용하는 UTM 체계에 대한 논의 또한 이루어졌다. 또한 도심 공역 구획, 동적 공역 교통 관리와 충돌 없는 운항을 위한 전략적 관리 프레임워크에 대해서도 논의된다. 더불어 셀룰러 기술 기반 공중 차량 통신과 관련된 기존 기법들을 종합적으로 비교하고, 각각의 장단점을 제시한다. 아울러, 5G 및 차세대 5G(Beyond 5G) 통신 기반의 고도화된 무선 인프라를 위한 공중 실험 및 연구 플랫폼에 대한 심화 연구를 제공하며, 복잡한 도심 공역 환경에서 안전하고 효과적으로 작동할 수 있는 완전 자율형 6G 기반 UAM 시스템 개발을 위한 로드맵도 함께 제시하고 있다.
UAM은 GPS, INS, 시각 항법 시스템을 조합한 항법 기술을 활용한다. 밀집도가 높은 도시에서 위성항법시스템(GPS)의 성능이 저하될 수 있기 때문에 Bijjahalli 등은 도시 구조물이 항법 정확도에 미치는 영향을 명시적 오차 분석을 통해 조사했다.[5] UAM의 안전성 및 안정성을 위해, 예측된 항법 성능에 근거해서 고도와 신호 반사를 포함한 요인들을 설명하는 유도 전략을 디자인했다.
Ye 등은 eVTOL 접근 절차의 최종 단계를 위한 항법의 두 가지 방식을 제시했다.[6] 첫 번째 방식은 위성항법시스템과 관성항법시스템을 통합한 일반적인 하이브리드 항법 시스템으로, 최종 접근 단계에서 정확한 위치 정보와 수직 고도 유도를 제공한다. 두 번째 방식은 시각 기반 단독 항법 시스템으로, 카메라 영상을 활용하여 추가적인 위치 정보를 획득한다. (카메라 매개변수는 체커보드 패턴을 이용해 보정할 수 있다.) 이 시스템은 다른 시스템으로부터 독립적으로 작동한다.
AI 기술
AI기술은 eVTOL이 실시간 상황에 기반해 자율적으로 비행 제어를 조정할 수 있도록 한다. Huang은 다중 에이전트 의사결정 기법과 기계 비전(machine vision)을 결합하여 eVTOL의 지능형 제어를 개선하였다.[7] 기계 비전 기법은 최소 유효 숫자 알고리즘에 규모 정보를 추가하여 개선하였으며, 이로 인해 eVTOL 제어 시스템의 작업 효율성을 향상시키고 계산 요구 사항을 줄였다.
또한, 후보 선분을 병합하기 위해 다중 선분 기준을 적용하여 식별 성능을 최적화했다.
Deniz와 Wand는 도시 공중 교차로에 접근하는 eVTOL 항공기에 속도 추천을 제공하는 새로운 다중 에이전트 강화 학습 방법을 제안했다.[8] 이 방법은 충돌을 피하고 운용 효율성을 개선하는 데 도움을 주며, 교통 혼잡으로 인한 지연을 줄이고 고밀도 UAM 운항을 처리할 수 있도록 eVTOL 항공기를 유도한다. 시뮬레이션 결과, 이 방법은 교차로 분리 문제를 해결하고 도시 공역에서 항공 교통 관제를 개선하는 데 효과적임을 입증했다.
블록체인 기술
블록체인 기술은 중앙 기관의 개입 없이도 UAM 데이터를 안전하게 저장하고 교환할 수 있는 분산형 플랫폼을 제공할 수 있으며, 이를 통해 민감한 정보가 인가되지 않은 접근으로부터 보호될 수 있다. 이는 UAM과 항공로를 실시간으로 추적해 효율적이고 안전한 UAM 교통 관리를
가능하게 한다.
Freeman과 Garcia는 UAM 환경에서의 사이버 보안 위협을 해결하기 위해 허가형(permissioned) 블록체인 접근 방식을 제안하였다. 이 방식은 네트워크 참여를 인가된 주체로 제한함으로써 데이터 보안과 위변조 방지를 보장한다. 이러한 특성은 블록체인 기술이 중간자 공격(man-in-the-middle attack), 스피어 피싱(spear phishing), 합법 계정 또는 외부 노출 애플리케이션의 악용 등 다양한 사이버 보안 위협에 효과적인 대응책이 될 수 있음을 보여준다.
한편 UAM 아키텍처는 무인 항공 교통 관리(UTM) 운영을 기반으로 구성되어야 하며, 이 환경에서는 UAM 운영자, UAM 서비스 제공자(PSUs), 그리고 보조 데이터 서비스 제공자(SDSPs)가 블록체인 네트워크를 통해 안전하게 데이터를 교환하고 상호 통신할 수 있어야 한다. PSUs는 공역 관리, 항공기 추적 및 통신 서비스와 같은 기능을 제공할 수 있으며, SDSPs는 기상 정보나 교통 정보와 같은 추가 데이터를 제공할 수 있다. 이와 같은 시스템은 UAM 운영자들이 도심 환경 내에서 항공기를 보다 안전하게 공동으로 관리할 수 있도록 해 줄 것이다.
디지털 트윈과 클라우드 기술
디지털 트윈(Digital Twin)은 산업용 인터넷, 에너지 산업, 물류 및 공급망 관리 등의 분야에서 고유한 이점을 제공하는 신흥 기술로, 최근에는 UAM 시스템에서도 점차 활용이 확대되고 있다. 디지털 트윈 기술은 UAM의 버츄얼 카피를 가능하게 하여, 시스템을 실제로 만들기 전 가상 시뮬레이션을 통해 개발할 수 있도록 한다. Brunelli 등은 이탈리아 볼로냐라는 실제 도시를 반영한 시나리오를 통해 도심 환경에서 자율 주행 차량의 안전을 보장하고 효율적 항로를 결정하는 디지털 트윈 모델과 3D 공간 네트워크 모델을 제시했다. 이는 UAM과 실제 교통환경을 접목하는 방식을 탐색하는 데 좋은 시각을 제공한다.
클라우드 컴퓨팅은 효율적인 데이터 저장 및 처리 기능을 제공함으로써 항공기의 실시간 위치, 교통 제어, 기상 상황, 센서 데이터 등 대규모 데이터를 처리하는 데 도움을 준다. Wieland 등은 클라우드 기반 비행 관리 시스템(CFMS: Cloud-based Flight Management System)의 개념을 탐구하였다.[9] CFMS는 클라우드 환경에 호스팅된 기존 FMS(Flight Management System)의 디지털 트윈으로서, 기존 지상 항공 시스템에서는 활용하기 어려운 방대한 정보에 접근할 수 있으며, 이전에는 실현이 어려웠던 고성능 계산 작업도 가능하게 한다. CFMS는 경로 협상, 우회 경로 정보의 교환, 도심 풍속 정보의 공유, 계획되지 않은 통제공역 접근 대응 등 다양한 응용 가능성을 지니고 있으며, 실험실 시뮬레이션 및 실제 비행 시험을 통해 개념의 정량적 검증도 가능하게 할 수 있다. |
|
|
도전과제와 전망
- eVTOL 항공기: 실제로 적용하는 데에 기술적인 제약 및 하드웨어적 한계를 고려해야 한다. 예를 들어, UAV의 안전과 안정성 측면에서 IT 기술을 적용한 자율적인 의사결정 시스템은 승객의 안전을 보장하기 위해 반드시 신중하게 평가되어야 한다. 또한 eVTOL이 교통 수요를 처리하기 위해서는 배터리 수명과 충전 시설이 고려되어야 한다.
- 소음 공해: UAV가 다른 교통수단보다 낮은 소음을 가지고 있지만, 여전히 인구 밀도가 높은 도심에서 주민의 삶의 질에 부정적인 영향을 준다. 특히 이착륙하는 것과 지형물 위로 비행하는 것은 근처 주민의 수면과 휴식을 방해하여 신체적/정신적 건강 문제로 이어질 수 있다. 이에 대해 Afari와 Mankbadi는 다중 로터 기반의 차세대 항공 모빌리티 기체에서 발생하는 평면 내 두께 소음을 줄이기 위해 능동 소음 제어 기술을 개발하였다. eVTOL 소음이 도시 지역 사회에 미치는 영향을 완화하기 위해, 저소음 프로펠러와 흡음 소재와 같은 소음 저감 기술을 개발하고 적용해야 한다.[10]
- 통합성과 상호운용성: 지상교통관리 시스템, 도심항공교통 시스템, 각각의 모빌리티와 같은 UAM 구성요소들 간의 효과적인 커뮤니케이션 능력은 UAM 시스템의 효율적 운영을 위해 필수적이다. 각각 다른 회사와 단체에서 서로 다른 기술과 표준으로 개발된 구성요소들 간의 상호운용성은 매우 필수적이므로, 표준과 프로토콜을 확립해야 할 것이다.
- 무선 통신 성능: 지상 통신을 위한 무선 연결 성능은 안정성, 관리에 영향을 미친다. 관련하여 다양한 매개변수 설정 하에서의 연결 성능을 제시함으로써, 실질적인 UAM 설계 지침을 제공하는 확률 기하학에 기반한 공간 모델이 있다. 또한 전 공역에 걸친 다양한 일상 업무를 용이하게 수행할 수 있도록 하는 새로운 구조적 설계를 포함한 인공지능(AI) 시스템으로 보강된 6세대(6G) 통신 기술의 UAM 적용 가능성이 제안되고 있다.
- 통신 보안: UAM과 같은 상호 연결된 시스템에서는 민감한 정보의 기밀성과 보안을 보장하는 것이 매우 중요하다. 이를 위해 안전하고 신뢰할 수 있는 데이터 전송을 가능하게 하는 기술 중 하나인 양자 통신의 가능성이 높게 평가되고 있다. 한편 UAV 운용 과정에서 지상 인프라와의 통신은 개방된 채널을 통해 이루어지기 때문에, 다양한 보안 공격에 취약할 수 있다. 따라서 UAM 환경에서는 안전한 상호 인증 체계가 필수적이다.
- 주파수 자원 관리: 도심 지역에서는 다양한 장치들이 주파수 대역을 공유하고 있어 주파수 자원의 가용성이 상대적으로 제한적이며 혼잡한 상황이다. 주파수 자원 부족은 UAM교통 기술의 광범위한 도입을 저해할 수 있으며, 주파수 확보 없이는 UAM 시스템이 안전성과 효율성 측면에서 문제에 직면할 수 있다. 따라서 도시 환경에서의 UAM 시스템을 위한 신뢰성 있고 안전한 무선 통신을 확보하기 위해, 이해관계자들이 함께 협력하여 이 과제를 해결하고 효과적인 방안을 모색하는 것이 필수적이다. |
|
|
UAM(도심 항공 모빌리티)의 발전은 정보기술(IT)에 크게 의존하고 있으며, 이를 통해 항공교통관리, 비행 제어, 비행 안전, 데이터 보안 등 다양한 응용 분야가 가능해졌다.
그러나 UAM 시스템은 시스템 간 통합성과 상호운용성, eVTOL 기체의 비행 지속 시간, 소음 공해, 통신의 안전성과 효율성 등 여러 과제에 직면해 있다. eVTOL의 잠재력을 실현하고 기존 도시 교통 시스템에 성공적으로 통합되기 위해 이러한 문제들을 해결하는 것이 반드시 필요하다.
그럼에도 불구하고 eVTOL은 매우 유망한 미래를 가지고 있으며, 향후 수십 년간 증가하는 도시 교통 수요를 해결하는 핵심적인 역할을 할 것으로 기대된다. UAM 시스템에 대한 지속적인 연구 및 개발, 그리고 이해관계자 간 협력은 이 획기적인 교통 시스템의 성공을 위한 핵심 요소이다. |
|
|
도심항공교통(UAM)의 발전은 안정적인 통신망과 데이터 기반의 교통관리 시스템 구축에 달려 있으며, 이를 위해 IT 기술이 핵심적인 역할을 수행한다. 본 페이지는 UAM 시스템 내 IT 기술의 적용 분야와 그 발전 방향을 기술적으로 분석한다. |
|
|
오늘의 뉴스레터는 여기까지!
뉴스레터는 어땠나요?
더 읽어보기
[1] INTWALA, Aditya; PARIKH, Yash. A review on vertical take off and landing (vtol) vehicles. International Journal of Innovative Research in Advanced Engineering (IJIRAE), 2015, 2.2: 187-191.
[2] G. Palaia, K. Abu Salem, V. Cipolla, et al., A conceptual design methodology for e-VTOL aircraft for urban air mobility, Appl. SCI. 11 (2021) 10815
[3] Q.V. Dao, J. Homola, M. Cencetti, et al., A research platform for urban air monility(UAM) and UAS traffic management(UTM) concepts and application, International Conference on Human Interaction & Emerging Technologies, IHIET, 2019 ARC-E-DAA-TN68588, 2019.
[4] K. Park, J. Lee, H. Ryu, et al., A novel cell deployment for UAM communications in 5g-advanced network, in: 2022 IEEE Globecom Workshops (GC Wkshps), IEEE, 2022, pp. 1431-1436.
[5] S. Bijjahalli, R. Sabatini, A. Gardi, Gnss performance modelling and augmentation for urban air mobility, Sensors 19 (2019) 4209.
[6] S. Ye, Z. Wan, L. Zeng, et al., A vision-based navigation method for eVTOL final approach in urban air mobility (UAM), in: 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI), IEEE, 2020, pp. 645-649.
[7] Z. Huang, Uav intelligent control based on machine vision and multiagent decision-making, Adv. Multimed. (2022) 2022.
[8] S. Deniz, Z. wang, A multi-agent reinforcement learning approach to traffic control at future urban air mobility intersections, in: AIAA SCITECH 2022 Forum, 2022, p. 1509.
[9] F. Wieland, T. Kilbourne, C. Snipes, Uses of a cloud-base flight management system to enhance airspace efficiency, in: 2022 Integrated Communication, Navigation and Surveillance Conference (ICNS), IEEE, 2022, pp. 1-5.
[10] S.O. Afari, R.R. Mankbadi, Active noise control of multirotor advanced air monility vehicles, J. Amer. Helicopter Soc. (2023)
|
|
|
|