UAM 교통관제시스템 개발 동향 및 설계 개념
UAM 교통관제시스템 개발 동향 및 설계 개념
|
|
|
기존의 자동차와 항공기 중심의 모빌리티 산업이 전기 자동차, 하이브리드 자동차, 수소 자동차 등 친환경 차량과 자율주행, 무인, 커넥티드 자동차 등의 스마트 차량으로 급격히 변신하고 있다. 항공 분야에서도 전기에너지 기반의 친환경 비행체와 저고도 상용 통신망 기반의 비행체 수요가 증가하고 있다. 이러한 배경 속에서 도심 저고도 공역에서 비행이 가능한 친환경 전기동력 수직 이착륙기를 활용한 도심항공교통(UAM)이 부상하고 있다. UAM 기체의 안전한 운항을 위해서는 기본 유인항공기 교통관제시스템과 다른 새로운 교통관제시스템이 필요하다. 특히 600m 이하 저고도에서 비행하는 UAM을 위해 GPS 위성 항법 시스템, 저고도 레이더 시스템, 짧은 구간 비행에 적합한 관제 및 운용 시스템이 요구된다. |
|
|
도심항공교통관리(UATM, UAM Traffic Management)는 기존 유인항공기 ATM과 유사하게 UAM 비행체의 안전 및 효율적인 운항을 위한 다양한 서비스를 제공하는 시스템이다. 이 시스템은 교통정보를 포함한 다양한 부가 서비스를 제공 관리를 수행한다. |
|
|
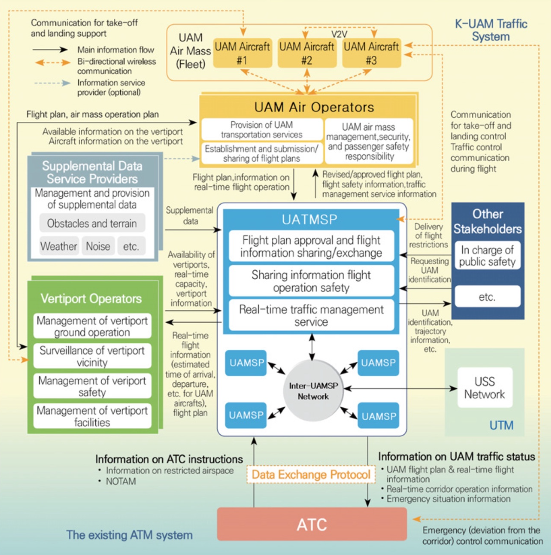
UATM이 해당 기능들을 원활하게 수행할 수 있게 하도록 국내의 K-UAM ConOps에서는 UAM 운용과 관련된 주요 이해관계자의 역할과 책임, 기본 연계 구조를 다음 그림1.과 같이 정의하였다. |
|
|
그림 1. 초기 K-UAM 환경에서 이해관계자간 관계 |
|
|
주요 이해관계자는
1. UAM 운항사: UAM 비행체를 운용하며 UAM 운송 서비스를 제공한다. 이들은 비행 계획의 작성, 제출 및 공유, UAM 기단 관리, 보안 및 승객 안전에 대한 책임을 진다.
2. UAM 교통관리 서비스 제공자: 이들은 운항 안전 정보를 공유하고 교통 흐름을 관리하며, 비행 계획을 승인하고 항로 이탈을 모니터링한다.
3. 버티포트 운영자: 버티포트의 지상 운용 관리, 권역 감시, 보안 및 안전 관리. 시설 관리를 담당한다.
4. 운항 지원 정보 제공자: 장애물 및 지형 정보, 기상 정보, 소음 정보 등 안전 운항과 관련된 부가 정보를 제공한다.
5. ATC(Air Traffic Control): 제한 공역 정보와 NOTAM 정보를 제공한다.
6. UTM(UAS Traffic Managemgent): 무인항공기 관제 정보를 제공한다.
7. 공공안전 담당자: 공공안전 관련 업무를 담당한다. |
|
|
해외 사례로 EMBRAER X는 UATM 설계 시 고려해야 할 다섯가지 원칙을 제시하였다:
1. 운항 상황 정보의 공유
2. 동등한 공역 사용
3. 운용 안전 위험 최소화
4. 공역 사용 최적화
5. 공역 구조의 유연성 및 적응성 확보
|
|
|
EMBRAER X는 또한 UATM이 제공해야 하는 주요 서비스를 다음과 같이 정의하였다:
기반 서비스: UAM 운용 전에 반드시 구축되어야 하는 서비스로, 공역 및 절차 설계와 정보 교환이 포함된다.
상시 제공 서비스: UAM 운용 과정에서 항상 제공되어야 하는 서비스로 비행승인, 교통 흐름 관리, 동적 공역 관리, 비행 계획 기반 항로 준수 모니터링이 포함된다.
|
|
|
해외에서는 기존의 ATM 시스쳄 개발사뿐만 아니라, 무인항공기 교통관리시스템(UTM) 개발사들이 다수 등장하여 UAM의 교통관제 시스템 개발에 참여하고 있다. 그러나 UAM과 같은 새로운 개념의 비행체에 대한 세부적인 규정 및 절차가 아직 충분히 마련되지 않아 공식화된 UATM 시스템은 출시 되지 않았다.
|
|
|
해외 UATM 개발은 ATM의 정보 공유체계와 UTM 데이터 중심의 데이터 공유체계를 기반으로 진행되고 있다. 기존의 비행계획서, 감시정보, 공역 정보 등의 표준화된 데이터 외에도 유선통신(5G/6G), 클라우드, 카메라를 통한 감시 등의 새로운 기술이 점진적으로 도입되고 있다.
|
|
|
미국 연방항공청(FAA)은 UAM 관제공역에 대한 방안과 운영 개념을 xTM(Extensible Traffic Management) 개념으로 제시하여, 서비스 네트워크 기반의 고도로 자동화된 협력 환경을 기반으로 연구 및 개발을 진행 중이다. NASA는 현재 개발 중인 드론 교통관리시스템을 고도화하여 분산형 교통관리 시스템을 개발하고, 이를 UAM 교통관제에 활용하는 방안을 고려하고 있다.
|
|
|
유럽에서는 SESAR(Single European Sky ATM Research)를 중심으로 UATM 운영 환경 도입을 위한 연구 및 실증사업이 추진되고 있다. 기존의 공항 중심 운영에서 벗어나 서비스 중심의 고도화 요소들을 개발하여 가상화, 연결성, 정보공유, 항공 자동화, 지상 자동화 등을 통합한 디지털화된 통합공역을 지향하고 있다.
|
|
|
민간 기업들 또한 UATM 개발에 활발히 참여하고 있다. 스페인의 Indra는 기존의 ATM 기술을 기반으로 UTM 솔루션 개발을 완료했으며, UAM 교통관제를 위한 솔루션 개발을 진행 중이다. 유럽의 ANRA Technology는 UAM 교통관제시스템인 “SmartSkies”를 개발하여 UTM 및 UATM 종합 서비스를 구축하고 시험 중이다. 벨기에의 Unifly는 UTM 시스템을 기반으로 무인기와 UAM이 비행하는 공역 현황을 종합적으로 감시하는 솔루션을 개발하고 있다.
|
|
|
해외와 마찬가지로 국내에서는 아직 공식화된 UATM 시스템이 출시되지 않았지만, 정부 주관의 국책 과제를 통해 UATM 시스템 개발이 진행 중이다. “저밀도 도심항공모빌리티 교통관리 CNSi 획득 활용 체계 신뢰성 검증 기술 개발” 연구 갤과 K-UAM Grand Challenge에 참여하는 여러 컨소시엄들이 UATM 시스템의 운영 개념 및 시스템 연구 개발을 추진하고 있다. 2025년에는 1단계 고흥 실증사업과 2단계 도심지 실증에서 UAM 비행체 및 UATM 시스템에 대한 시나리오 기반 가능 및 운용성 검증이 계획되어 있다.
|
|
|
국내 UATM 개발은 항공 데이터 통합 및 자동화를 고려하여 데이터 중심의 데이터 공유 체계를 사용한 시스템 개발을 진행 중이다. 특히, 차세개 항공 데이터 국제 표준인 SWIM(System Wide Information Management) 방식을 적용하여 기존 ATM 정보 공유체계와의 호환성, 자동화, 확장성을 고려한 설계를 추진하고 있다. |
|
|
민간 기업으로는 현대차그룹이 유럽의 ANRA Technology와 협업하여 UATM 개발을 추진 중이며 한국공항공사, SK텔레콤, 한화시스템도 UAM Grand Challenge에 참여하고 있다. |
|
|
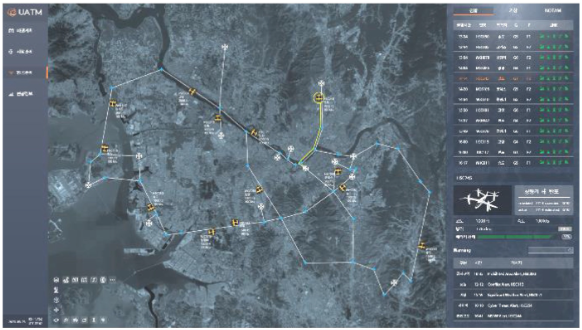
다음은 UATM 개념 설계에서 도출된 사용자 인터페이스 화면 예시다. |
|
|
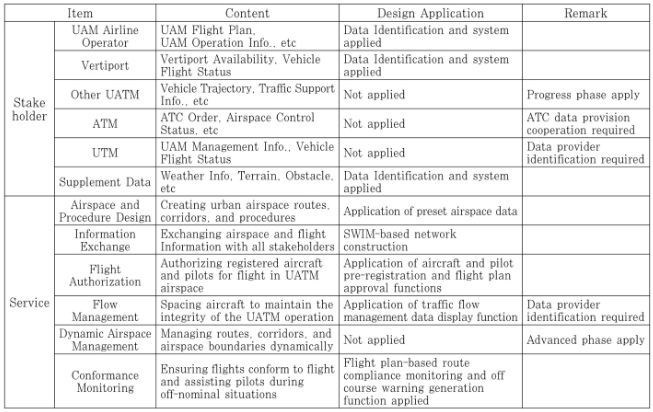
UATM은 UAM 비행체의 안전 운항을 지원하는 시스템이다. 주요 서비스는 공역 설계, 데이터 교환, 비행승인, 항로 준수 모니터링이다. |
|
|
K-UAM ConOps에 따라 초기 운용 단계에서 UAM 운항사와 버티포트 운용자 간 데이터를 연동했다.(아래 사진) 단 ATC 연동은 데이터 제공 협조가 필요하기 때문에 현재 제외되었으며, UTM 시스템은 추후 연동을 위해 데이터만 식별했다. 다른 UATM과의 연동은 UAM 시장 성장 후 적용 예정이다. |
|
|
공역 설계는 사전 설정된 정보를 반영하되 실시간 변경은 추후 적용한다. 데이터 교환은 SWIM을 기반으로 설계에 반영했다. 비행승인 서비스는 등록된 비행체와 조종사만 운용 가능하게 하고, 비행계획 승인 처리를 반영했다. 항로 준수 모니터링은 비행 상태를 모니터링하며, 이탈 시 경고 기능을 포함한다. 교통 흐름 관리는 데이터 제공자가 없어 식별 후 제한적으로 설계에 반영했다. |
|
|
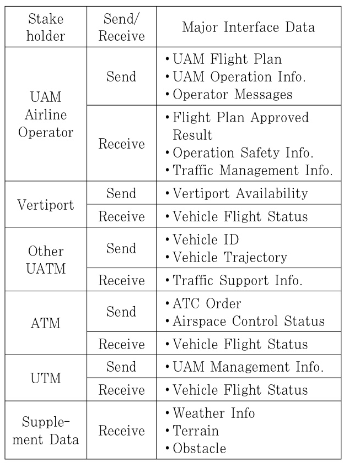
K-UAM ConOps에서 정의된 기본 연계 구성 및 이해관계자 간 역할과 책임 정보를 기반으로 UATM 시스템과 주요 이해관계자 및 각 이해관계자 간 예상되는 연계 데이처를 구체화하여 식별 후 정리한 결과는 아래 사진과 같다. |
|
|
표2. UATM 환경에서 주요 이해관계자간 연계되는 데이터 |
|
|
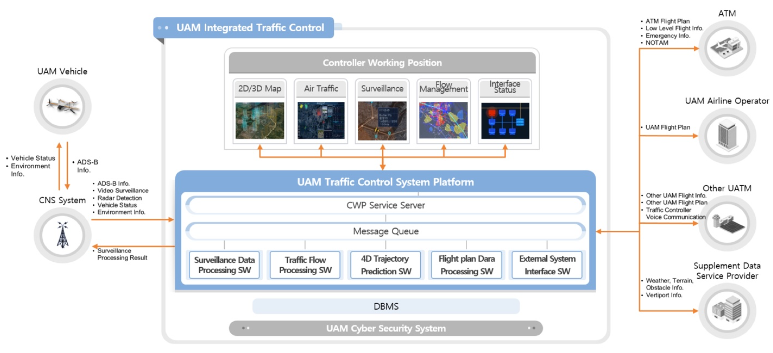
UATM 시스템과 연동하는 주요 이해관계자와 주요 데이터를 기반으로 시스템에 대한 아키텍쳐 설계를 적용한 결과는 그림3.과 같다. |
|
|
UATM 시스템은 비행체와 이해관계자 간의 데이터 연동 처리와 전체 시스템 상태 정보 현시를 수행할 수 있도록 설계되었다. 사이버 보안 위협을 방지하기 위해 구성 서버, PC, 네트워크 장비에 별도의 보안 시스템을 적용했다. |
|
|
시스템 외부와의 데이터 연계는 연동 정보 처리 소프트웨어를 통해 수행하며, 내부 구성요소 간 데이터 연계는 Message Queue가 담당한다. 주요 생성 정보 및 저장이 필요한 데이터는 DBMS를 통해 저장한다. |
|
|
관제 형시 시스템에서는 내부 및 외부 연계 데이터를 확인할 수 있으며. 서비스 서버에서 모든 데이터의 취합과 운용자 인가 설정 연계를 수행한다. 시스템은 다중 하드웨어로 구성되어. 고장이 발생해도 Hot Standby 상태의 다른 하드웨어로 즉시 전환하여 시스템 중단을 방지한다. |
|
|
UATM 시스템은 비행체 위치정보, 지상 감시정보, 기존의 ATM 및 운항사, 다른 UATM으로부터 수신한 외부 연동 정보를 수신 및 내부 배포 처리하며, 내부 생성 및 외부 연동 이해관계자에게 송신하는 데이터를 취합 및 배포처리한다. |
|
|
비행계획 처리 소프트웨어는 수신된 비행계획을 검토하여 안전 비행 가능 여부를 기준으로 승인/불승인 처리를 수행한다. 감시정보 처리 소프트웨어는 ADS-B 신호 및 레이더 탐지 정보를 기반으로 비행체 Track 정보를 생성 및 배포하며, 비행 중 충돌 여부를 판별하고 경고 정보를 생성한다. |
|
|
항적 예측 소프트웨어는 비행계획 정보를 사용해 비행체가 계획된 경로를 따르는지를 확인하고, 전략적 충돌 판별 처리 로직을 수행한다. 교통흐름관리 소프트웨어는 교통흐름관리 메시지 수신 및 취합, 교통량 통계 정보 관리 기능을 제공한다. |
|
|
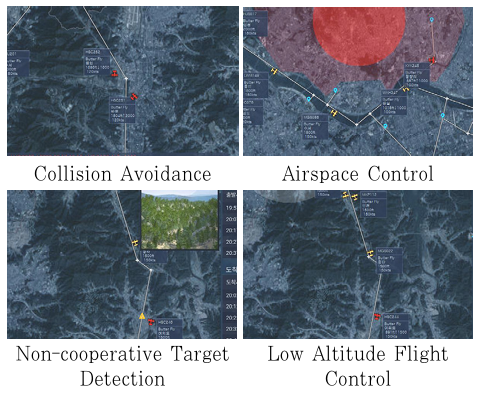
관제 현시 소프트웨어는 다양한 돌발 상황에 대한 실시간 모니터링 정보, 충돌 위험 경고. 공역 통제, 비인가 구역 통제, 비협력적 장애물 탐지 및 경고, 악기상 발생 시 비행계획 변경, 저고도 비행 통제 기능을 제공하며, 사이버 보안 시스템과 연동하여 사이버 위협 관리 기능도 수행한다. |
|
|
UAM 비행체 및 UATM 시스템의 세부 운용 절차 및 규정이 아직 정의되지 않아, 현재 설계에는 제한적인 정보만 반영되었다. 특히, 데이터 생성 및 배포 주체가 결정되지 않은 교통흐름관리 시스템은 저고도 고밀도 환경에서 운용될 UAM 비행체에 맞는 새로운 기준이 필요하다. |
|
|
해외에서는 UTM 시스템과 UATM 시스템을 통합 운용하는 통합관제 시스템 개발이 활발히 진행 중이다. 이는 민간뿐만 아니라 군용 유인기와 무인기, UAM 기체를 종합적으로 관제할 수 있는 체계를 요구한다. |
|
|
현재 UAM 비행체는 조종사가 탑승한 상태에서 운용되지만, 향후 비행체 기능이 고도화되고 안정성이 확보되면 조종사가 지상에서 원격으로 비행체를 운용하는 환경이 도입될 가능성이 있다. 이에 따라 관제 시스템과 운항사의 비행체 운용 시스템 간의 연동도 필요하다. |
|
|
현재 Grand Challenge는 1단계가 진행중인 상황이다. 국내 제작한 OPPAV 뿐만 아니라 Joby 기체 등이 실증사업 기간동안 적극적으로 참여하여 비행을 해야 할 필요가 있다고 생각한다. UAM의 실현을 위해서는 반드시 실제 운용 가능한 기체를 이용한 데이터의 수집이 가능해야만 관련 법, 규제, 인프라 적인 부분이 실제 운용에 가깝게 설계될 수 있기 때문이다. |
|
|
오늘의 뉴스레터는 여기까지!
뉴스레터는 어땠나요?
더 읽어보기
[1] 허창환, 강광천, & 윤형근. (2023). UAM 교통관제시스템 개발 동향 및 설계 개념 연구. JITAM, 30(6), 81-90.
|
|
|
발행 KUTAM
작성 양우림
검수 AAM Open Space |
|
|
|
|